Tiny Robotic Screw Could Revolutionize Treatment for Fallopian Tube Obstructions
Tens of millions of people worldwide suffer from infertility due to fallopian tube obstructions, but a new technological breakthrough may offer hope. Researchers from the Shenzhen Institutes of Advanced Technology (SIAT) have developed an innovative solution using a magnetically driven robotic microscrew to clear these blockages, offering a potentially less invasive alternative to traditional surgical methods.
How the Robotic Microscrew Works
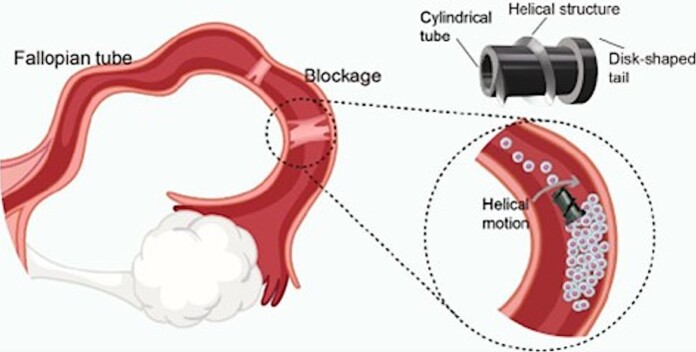
The new microrobot, designed from nonmagnetic photosensitive resin and coated with a thin iron layer, utilizes an external magnetic field for control. When the magnetic field is applied, the robot rotates, generating translational motion that allows it to navigate through a channel simulating the narrow structures of the fallopian tube. In tests, the robotic screw successfully cleared obstructions, demonstrating its ability to navigate and clear a blockage effectively.
The screw-shaped microrobot features a helical structure for propulsion and a disk-shaped tail for stabilization. As the screw rotates, it generates a vortex field that pushes debris toward the tail, effectively clearing the obstruction. This approach provides precise navigation through delicate and narrow channels, a major advancement over conventional catheters and guidewires typically used in surgeries for fallopian tube blockages.
Potential Advantages Over Traditional Surgery
Currently, traditional methods for treating fallopian tube obstructions are invasive and often require surgical procedures. These methods typically rely on the use of catheters and guidewires to clear the blockage, which can be difficult and risky. The new robotic screw offers a potentially safer, less invasive solution, making it an exciting prospect for those affected by infertility due to tubal obstructions.
The SIAT team, led by Haifeng Xu, believes this innovative microrobot could become a powerful tool in the fight against infertility. It could not only improve treatment outcomes but also reduce the need for invasive surgeries, which can be costly and carry risks for patients.
Future Directions for the Technology
Looking ahead, the SIAT research team plans to refine the design of the microrobot, making it smaller and more advanced. The goal is to test the robot in isolated organ models and incorporate real-time in vivo imaging systems to track its movements and position. This would allow for even more precise control during medical procedures.
Furthermore, the researchers hope to expand the applications of this technology beyond fallopian tube blockages. They envision incorporating automatic control systems that could enhance the robot’s effectiveness in various surgeries, improving the efficiency and precision of blockage removal and other medical interventions.